Réalisation d'un drone à base d'Arduino - Chapitre 2

Sommaire
- 1. Le cadre
- 2. Les hélices
- 2.1 Forme & matériaux
- 2.2 La longueur
- 2.3 Le pas
- 2.4 En résumé
- 3. Les moteurs
- 3.1 Moteurs brushless
- 3.2 Caractéristiques
- 3.3 Choisir ses moteurs
- 4. Les ESC
- 4.1 Anatomie d'un ESC
- 4.2 La modulation PWM
- 4.3 Choisir ses ESC
- 5. La batterie
- 5.1 Accumulateur LiPo
- 5.2 Equilibrage
- 5.3 La sécurité avant tout
- 5.4 Choisir sa batterie
- 5.5 Choisir son chargeur
- 6. La Power Distribution Board
- 7. Les capteurs
- 8. Le module de communication sans fil
- 9. L'ordinateur de bord
- 10. Conclusion
Bonjour à tous,
Cet article fait suite au premier chapitre que je vous conseille vivement de lire avant celui-ci afin de ne pas être largué par la suite.
Dans cet article, nous allons voir plus en détail l'anatomie d'un drone et comment choisir ses pièces.
C'est parti !
1. Le cadre
Pas vraiment de mystère à son sujet, le cadre est le squelette du drone. C'est là-dessus que vont venir se fixer tous les élements.
Il peut avoir des formes très différentes et être construit dans différents matériaux.
Le profil du cadre impact le type de vol: nerveux & réactif ou stable & portant une charge (une caméra par ex).
Voici quelques exemples de formes de cadre:

Il en existe en toute sorte de matériaux, en carbone, en aluminium, en bois... et même en chocolat ou en glace, oui oui !
A ce sujet, je vous invite à jeter un œil à cette chaine YouTube qui fabrique des cadres en tout et n'importe quoi !
Il faut savoir que le cadre va être sujet aux vibrations générées par les moteurs. Aussi, le choix du matériaux n'est pas à prendre à la légère. Par exemple, on pourrait penser que le bois est un bon compromis entre légèreté et solidité, mais dans la réalité c'est un piètre candidat.
Je vous invite vivement à lire cet article qui fait un comparatif entre différent matériaux. Le résultat est sans appel, le bois est à proscrire.
En ce qui me concerne, j'ai orienté mon choix vers des tubes d'aluminium creux à section carrée, d'environ 2,5cm d'épaisseur.
Pourquoi de l'aluminium et pas du carbone par exemple ?
Tout simplement parce qu'il a un bon rapport poids/rigidité et que j'en avais sous le coude ! Mais sérieusement, c'est un bon compromis, le carbone étant nettement plus cher.
Ensuite, la taille et la forme du cadre vont définir le type de vol de votre drone:
- Nerveux (accro, vitesse)
- Polyvalent
- Stable (ballade, prise de vue, FPV, etc ...)
A vous de choisir ce que vous voulez 😉
Pour du vol type "prise de vue", il vaut mieux privilégier un cadre bien symétrique et relativement grand, ce qui apportera naturellement de la stabilité au drone.
Pour du vol type "course", il vaut mieux un cadre profilé et plutôt petit ce qui apportera de la réactivité au drone.
2. Les hélices
2.1 Forme & matériaux
Les hélices sont au cœur de la propulsion du drone. Seulement voilà, il existe autant de tailles que de formes différentes, et utilisant différents matériaux.

Généralement, on partira sur des hélices à deux pales, bien que dans certains cas particuliers, des hélices à trois pales peuvent être utilisées.
Pour un diamètre et un pas équivalent, la poussée d'une tripale est plus élevé mais cela nécessite plus d'énergie pour la faire tourner. On augmente donc la consommation du drone.
Par contre, à poussée égale, le rendement de la bipale est meilleur que celui de la tripale.
Un cas où ça vaudrait le coup de passer sur une tripale serait quand les moteurs ne sont pas exploités à fond avec des bipales mais qu'il vous est impossible de prendre des hélices plus grandes car manque de place. Dans ce cas, on passe à la taille en dessous en version tripale.
Généralement, il suffit de réduire de 1 le diamètre d'une bipale pour avoir son équivalent en tripale.
Pour le matériaux, vous vous douterez que le candidat idéal est le carbone mais son prix peut être dissuasif. Aussi des hélices en plastique peuvent faire l'affaire, c'est en tout cas ce que j'ai constaté. L'idée c'est d'avoir une hélice rigide, solide et légère.
Nous allons maintenant voir comment choisir des hélices en fonction du type de vol souhaité. Ce choix va s'effectuer au travers de deux paramètres d'une hélice: la longueur et le pas.
2.2 La longueur
S'il est assez évident de savoir de quoi on parle ici, ça l'est moins de savoir ce que ça implique.
La taille de l'hélice (le diamètre) va conditionner la traction nécessaire pour faire décoller et voler le drone.
Une hélice dite longue va tourner moins vite qu'une hélice courte. Sa capacité de portance en revanche, sera naturellement plus importante du fait de sa taille. De plus, sa taille apporte de la stabilité en vol.
Une hélice dite courte va tourner plus vite qu'une hélice longue. Elle aura moins de portance mais apportera de la réactivité en vol.
La longueur d'une hélice s'exprime en pouces (8", 9", 10", etc...).

2.3 Le pas
Le pas d'une hélice défini la distance qu'elle parcours lorsqu'elle fait un tour complet.
L'exemple le plus simple que tout le monde connait est le boulon (vis + écrou). Lorsque la vis fait un tour complet dans l'écrou dans le sens horaire, elle avance d'une distance $x$ égale à son pas.
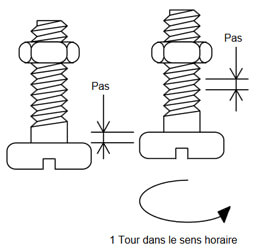
Pour une hélice c'est exactement la même chose sauf que là, l'écrou, c'est de l'air.
Si on sait maintenant de quoi on parle, reste à savoir ce que ça implique.
Un pas élevé implique une faible portance mais une vitesse de rotation maximale élevée. Un pas moindre implique une meilleure portance mais une vitesse de rotation max limitée (par compensation).
Les notions de faible et forte portance sont relatives l'une à l'autre.
On constate en fin de compte que le pas et la longueur sont implicitement liés par la vitesse de rotation max de l'hélice.
Vous n'aurez donc pas vraiment de choix à faire concernant ces deux paramètres. Vous choisirez plus généralement vos hélices en fonction de leur taille, le pas étant adapté par le constructeur.
2.4 En résumé
| Structure | Conséquence |
|---|---|
| Grande hélice | Beaucoup de portance, vol stable mais a besoin de puissance pour faire 1 tour entier → il faut un moteur puissant. |
| Petite hélice | Moins de portance, vol réactif et a besoin de moins de puissance pour faire 1 tour entier. |
| Petit pas | Plus grande traction à faible vitesse, mais vitesse maxi limitée. |
| Grand pas | Plus petite traction à faible vitesse, mais vitesse maxi élevée. |
Bien souvent, les caractéristiques d'une hélice sont présentées sous cette forme: 1045.
Dans cet exemple, ça signifie simplement une longueur de 10 pouces et un pas 4,5 pouces.
Pour du vol accrobatique, on préfèrera des hélices courtes apportant de la réactivité au drone. Pour du vol stable, on préfèrera des hélices longues apportant de la stabilité. Ça permettra également de transporter des charges (une caméra par exemple).
3. Les moteurs
Vous avez choisi vos hélices, il faut maintenant choisir les moteurs adaptés.
3.1 Moteurs brushless
Sans vouloir ancticiper sur la partie batterie, on va se diriger ici vers des moteurs électriques, prévus pour le modélisme aérien: les moteurs brushless, "sans balais" en Français.
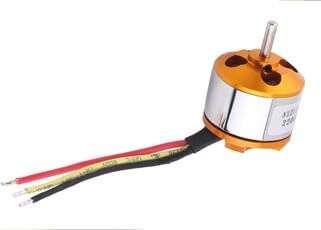
Contrairement aux moteurs à courant continu "classiques", ces moteurs n'ont pas de contacteurs physiques et appartiennent à la catégorie des machines synchrones.
Je vous laisse le soin de vous documenter si vous ne savez ce que c'est, on ne va pas entrer dans le détail ici. Notamment ici.
Ces moteurs éliminent tous les inconvénients des MCC: problèmes de commutation au niveau du collecteur, défrettage, inertie, refroidissement (les pertes joules étant situées au stator elles sont plus faciles à évacuer), puissance massique nettement plus grande, géométrie, durée de vie...
Bref, ils sont parfaitement adaptés pour notre drone.
3.2 Caractéristiques
Les caractéristiques de ces moteurs sont exprimées de la sorte: Brushless Motor 3508 650 KV 4-6S
Le premier nombre 3508 donne les dimensions du stator: 35mm de diamètre et 8mm de hauteur.
La deuxième information 650 KV donne le nombre de tours que le rotor peut faire en 1 minute et par volt.
Dans le cas présent, 650 KV signifie 650 tours/minute alimenté sous 1V, 1300 tours/minute sous 2V ...etc.
Vous pouvez aussi trouver cette information sous la forme 650 RPM, ce qui signifie la même chose.
Le dernier paramètre 4-6S donne le nombre de cellules de la batterie et donc le voltage (on y reviendra dans la partie sur la batterie). Ici entre 4 et 6 cellules.
Une autre valeur à prendre en compte est la consommation max en courant. Cette information est généralement clairement explicitée. Par exemple 30A.
Cela vous permettra par la suite de choisir vos ESC et votre batterie.
3.3 Choisir ses moteurs
Pour commencer, il faut définir à quel genre d’application est destiné le drone qui supportera ces moteurs et le poids final de l’appareil.
Paramètre à définir:
- Endurance souhaitée
- Taille du drone
- Poids total
- Charge utile
- Vitesse maximale
- Nombre de moteurs (4 dans notre cas)
- Utilité: vidéos, photos, cartographies, FPV
Il faut en général :
- 8 000 tours max pour du vol "stable" (prise de vue)
- 10 000 tours max pour du vol "normal" (polyvalent)
- 12 000 tours max pour du vol "nerveux" (accro, vitesse)
Donc si on veut voler avec une batterie 3S (11,1V):
- 8000 tours / 11.1V ≈ 720KV
- 10000 tours /11.1V ≈ 900KV
- 12000 tours / 11.1V ≈ 1100KV
Voici des exemples de combinaisons hélices & moteurs :
| Moteur | Hélice | Résultat |
|---|---|---|
| KV élevé | Grandes hélices | KO → tire beaucoup sur la batterie et risque de cramer les moteurs. |
| KV élevé | Petites hélices | OK → pour du vol accrobatique. |
| KV faible | Grandes hélices | OK → pour du vol stable. |
| KV faible | Petites hélices | KO → pas assez de portance, le drone ne décollera pas. |
Il existe un calculateur en ligne qui vous permettra de choisir de manière précise vos moteurs & hélices : http://www.ecalc.ch/
4. Les ESC
Un ESC (Electronic Speed Controller) est un contrôleur de vitesse électronique. En clair, un ESC sert à contrôler la vitesse de rotation d'un moteur brushless.
Il va donc être étroitement lié aux caratéristiques de ce dernier.
Mais avant de se lancer dans le choix des ESC, nous allons nous attarder sur leur fonctionnement.
4.1 Anatomie d'un ESC

Comme on peut le voir sur la figure ci-dessus, un ESC possède un connecteur 3 broches (parfois, seulement deux) sur lequel on retrouve
- Une broche de masse, ici le fil noir: à mettre en commun avec les masses des autres composants
- Une broche signal, ici le fil blanc : c'est une broche d'entrée sur laquelle on envoie le signal de commande de l'ESC
- Une broche d'alimentation (optionelle), ici le fil rouge : cette broche fournie une alimentation +5V qui peut servir à alimenter d'autres composants (un récepteur RF par exemple). Ça implique que l'ESC embarque un régulateur de tension en interne, ce qui n'est pas toujours le cas.
Les ESC fournissant une alimentation sont appelés ESC avec BEC (Battery Eliminator Circuit).
Du même côté que ce connecteur, on retrouve deux fils plus épais, un rouge et un noir. On devine rapidement qu'il s'agit de l'alimentation de l'ESC, à brancher directement sur l'alimentation générale du drone.
Enfin, de l'autre côté, trois fils, de la même couleur. Ces fils sont à brancher sur le moteur à contrôler.
Comment on sait dans quel ordre les brancher vu qu'ils ont la même couleur ?
Je vais vous révéler un truc: on s'en fou de l'ordre ! Rappelez-vous, les moteurs brushless se comportent comme des machines synchrones aussi, l'ordre de branchement n'affectera que... le sens de rotation, rien d 'autre !
Du coup, il vous suffit simplement de brancher dans n'importe quel ordre les fils, tester et inverser deux fils si le sens de rotation ne vous convient pas. Enfin un truc simple 🙂
4.2 La modulation PWM
Avant que les drones ne se popularisent, le modélisme aérien était surtout orienté autour des avions. Or, un avion s'oriente grâce à des gouvernails et non en jouant sur la vitesse de rotation du/des moteur(s).
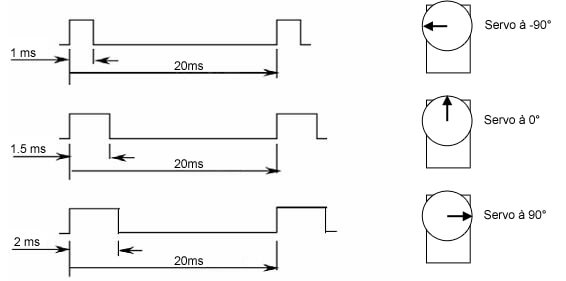
Ces gourvernails sont actionés grâce à des servomoteurs. Le contrôle d'un servomoteur se fait grâce à une PWM un peu particulière que nous allons voir plus en détail.
Elle a de particulier que la durée à l'étaut haut varie entre 1ms et 2ms, ni plus, ni moins. De plus, la position du servomoteur ne dépend pas du rapport cyclique de la PWM mais uniquement de la largeur de l'impulsion.
La plupart des servo RC se calent à la même position quand ils recoivent une impulsion de 1,5ms toutes les 6ms (rapport cyclique de 25%) que lorsqu'ils recoivent une impulsion de 1,5ms toutes les 25ms (rapport cyclique de 6%). Ca fait une réelle différence avec un moteur à courant continu dont, rappelons-le, la vitesse de roation dépend directement du rapport cyclique.
Sur le schéma suivant, le signal a une période 20ms (50Hz donc) et la largeur d'impulsion varie de 1ms à 2ms.
Aussi, une durée de 2ms (durée maximale) à l'état haut correspond à un angle de +90° et une durée de 1ms (durée minimale) correspond à un angle de -90°. On a donc bien un amplitude 180°.
C'est une explication très sommaire mais voilà en gros comment ça fonctionne.
D'accord, mais quel rapport avec les ESC et les moteurs ?
Et bien tout simplement, un ESC accepte en signal d'entrée ce type de signal PWM. Aussi, un angle de 0° (largeur d'impulsion de 1ms) stoppera complètement le moteur tandis qu'un angle de 180° (largeur d'impulsion de 2ms) le fera tourner à plein régime.
Ca peut paraître déroutant d'utiliser un angle pour faire tourner un moteur, mais ça fonctionne comme ça 😉
4.3 Choisir ses ESC
Vous avez choisi vos hélices, vos moteurs en conséquence, reste maintenant à trouver les ESC qui conviennent.
Le choix des ESC est assez simple et dépend beaucoup de votre budget et de la qualité désirée. Les variateurs ont deux valeurs importantes : l’amperage et le voltage.
Exemple: ESC 30A 3-4S
- 30A veut dire qu’il peut fournir jusqu’à 30A
- 3-4S définit le nombre de cellules de la batterie qui l’alimentera et donc son voltage (pour une batterie LiPo, on compte en général 3.7V / cellule)
Sur la fiche technique des moteurs est indiqué leur consommation maximale. Si un moteur a une consommation maximale de 25A, il faut prendre des ESC d’au moins 30A. Faites attention à avoir toujours une marge d’au moins 20% de la consommation maximale du moteur pour éviter les mauvaises surprises.
On choisit les ESC en fonction des moteurs et pas le contraire.
Nous aurons tout le loisir de revenir en détail sur les ESC dans un chapitre dédié, car il y en a des choses à dire et à faire avec des trucs là !
En ce qui me concerne, j'ai décidé de partir sur un drone stable, donc grandes hélices. En cherchant sur le net, j'ai trouvé des kits comprenant moteur/ESC/hélice. Ça évite de se prendre la tête trop longtemps en cherchant la combinaison parfaite, le kit proposant déjà une combinaison correcte. Pour info, voici le kit que j'ai utilisé.
5. La batterie
On a commencé à en parler dans les précentes parties, nous allons nous intéresser ici aux batteries car non, notre drone ne fonctionnera par à l'escence (bien qu'il pourrait).
Parmis tous les types d'accumulateurs existant (plomb, lithium, nickel, uranium...), on va s'intéresser aux accumulateur LiPo (Lithium - Polymère).
5.1 Accumulateur LiPo
Les batteries LiPo sont des accumulateurs électrochimiques dont la réaction est basée sur le lithium non pas à l'état ionique (pour le Li-Ion) mais à l'état de polymère (l'électrolyte est sous forme de gel) ce qui le rend beaucoup plus sûr que son cousin le Li-Ion. Comparativement aux "anciens" accumulateurs Ni-Mh, les avantages sont nombreux.
D'une part, il n'y a plus ce qu'on appelle l'effet de PEUKERT qui est lié à la résistance interne de la batterie. Plus on décharge fort et plus la chute de tension est importante et fait atteindre le seuil de tension minimale critique plus rapidement. Concrètement, on pouvait constater une diminution notable de puissance, sur ces accumulateurs au Nickel, au fil de l'utilisation ce qui n'est plus le cas des accumulateurs LiPo qui n'ont pas de paliers de décharge et conservent ainsi tout leur "Punch" (donc la puissance) au cours de l'utilisation.

De plus, elles profitent d'un autre avantage: le poids. En effet, ces batteries sont dénuées de tout emballage de métal qui alourdissait fortement les batteries au Nickel.
En outre, lors de la charge on peut désormais atteindre de plus hautes intensités. Il était, en effet, conseillé auparavant de charger une batterie Ni-Mh avec une intensité de charge égale à sa capacité (ce qui donne pour un accumulateur de 4000 mAh à une intensité de charge maximale de 4 A/heure).
A présent, les fabricants rapportent qu'on peut charger un accumulateur LiPo jusque 5 fois sa capacité (un accumulateur de 4000 mAh pourra donc être chargé à 20 A/heure !). Toutefois, il faut savoir que cela réduira la durée de vie de votre accumulateur. Il est donc conseillé de ne pas charger au dessus de 3C et l'idéal reste de charger à 1C. Rien ne vous empêche de charger occasionnellement à 2 ou 3C mais préférez fréquemment une charge à 1C.
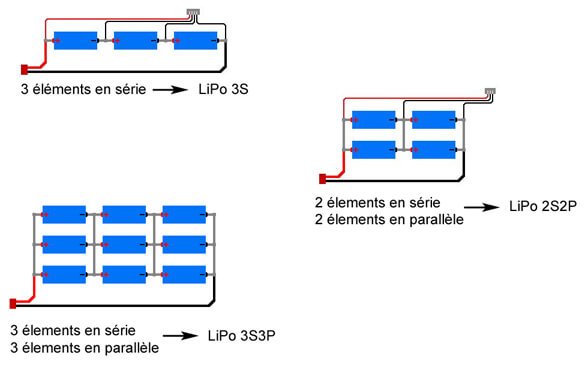
Les accumulateurs LiPo ont une tension nominale de 3,7V par élément (aussi appelé cellule). Le nombre d'élements en série constituant une LiPo est indiqué par la lettre S et le nombre de d'élements en parallèle est indiqué par la lettre P. Ainsi, un accumulateur 3S est constitué de 3 cellules en série.
Une cellule chargée à 100% aura une tension de 4,20V, valeur qu'il ne faut pas dépasser sous peine de destruction. Il ne faut pas descendre en dessous de 2,8v - 3,0V par élément. La tension de destruction est à 2,5V (si ce seuil est atteint, c'est poubelle !).
Il existe des petits LiPo testeurs à 5€ à brancher directement sur le connecteur d'équilibrage de la batterie et utilisable en plein vol. Si la tension d'une cellule (ou de la LiPo au global) descend en dessous d'une certaine valeur (que l'on peut paramétrer), le testeur se met à biper à fond. Impossible alors de ne pas savoir qu'il est temps de rentrer au bercaille et de recharger l'accu.
Un accumulateur 3S a donc une tension nominale de 11.1V (3 x 3.7), un 2S une tension de 7.4V, un 4S une tension de 14.8V ...etc.
Voici quelques exemples de configurations:
5.2 Equilibrage
Nous venons de le voir, une batterie LiPo peut être constituée de plusieurs éléments. Or, dès la fabrication des éléments, il est quasiment impossible d'obtenir des éléments avec des valeurs de résistance interne parfaitement similaire.
Au final, cette minime différence, sans équilibrage, va finir par s'accentuer du fait qu'un élément va plus être sollicité qu'un autre et tout cela va s'empirer lors des recharges et décharges en obtenant des éléments qui vont être, pour les uns trop chargés, et pour les autres trop déchargés. Cela conduira inéluctablement à des dommages irréparables.
Pour éviter ce phénomène, on équilibre les éléments à chaque charge et donc on égalise les voltages. Une tolérance de 0,05V à 0,1V est admise entre chaque élément.
Il est donc fortement recommandé d'utiliser un chargeur équilibreur à chaque charge.
Certains chargeurs possèdent même un mode de charge spécial pour le stockage de la batterie, dans le cas où celle-ci resterait au placard quelques temps.

5.3 La sécurité avant tout
Les accumulateurs de type LiPo ne sont pas sans danger. Si elles sont abimées, ou mal utilisées, les batteries LiPo peuvent prendre feu ou exploser. Soyez TOUJOURS vigilent lorsque vous les manipulez. Les LiPo, ça peut faire mal.
Sans déconner, vous pouvez foutre le feu à votre baraque, perdre un bras voir pire alors soyez aux petits soins avec vos LiPo.
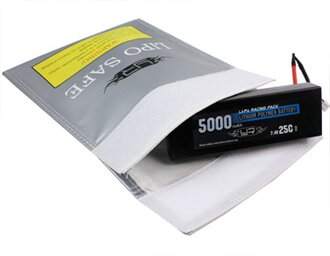
Vous devez les stocker à minima dans une boite en métal posée sur un support safe, genre béton. Le mieux étant dans un sac ignifugé, dans le une boite en métal.
Lors d'un crash, inspectez minutieusement votre batterie. Si vous avez le mondre doute, montrez-là à un professionnel.
Une batterie percée ou gonflée n'est plus utilisable et vous devez vous en débarasser.
Restez toujours à proximité lors de la charge. Laissez refroidir votre LiPo 15 à 60 minutes après la charge avant de vous en servir.
5.4 Choisir sa batterie
Le choix de votre accumulateur sera un savant mélange. Tout d'abord, il vous faudra connaître votre consommation. Cette dernière induira le choix d'un accumulateur avec un taux de décharge plus ou moins élevé.
Ce dernier vous informe sur le courant max que votre batterie pourra fourni. Par exemple, dans le cas de la figure ci-après:
- Taux de décharge: $50C$
- Capacité: $5Ah$
Cournat max: $50 \times 5 = 250A$
Ainsi, la batterie pourra fournir au maximum 250A. Prévoyez cependant une marge suffisante par rapport à la consomation max de vos moteurs. Votre batterie ne s'en portera que mieux.
Sera, en outre, à prendre en compte la tension d'alimentation nécessaire (en fonction de ce que demandent vos moteurs et contrôleurs), la taille et enfin le poids. L'autonomie ne sera que la conséquence de tout cela étant donné que la taille et le poids d'un accumulateur sont la direct conséquence de sa capacité.

En ce qui me concerne, à la vue des moteurs/ESC/hélices choisis précédemment, j'ai orienté mon choix vers un LiPo WIld Scoprion 3S 30C 5500mAh à connecteur DEAN, pour une 40ène d'euros. Elle m'a parru être d'un bon rapport qualité/prix et pour le moment j'en suis satisfait. Achetée en ligne sur http://www.onlylipo.com, ils faisaient des promos à l'époque.
5.5 Choisir son chargeur
Maintenant qu'on a une batterie, reste à pouvoir la charger.
Prenons un exemple: batterie LiPo 5000mAh avec un taux de charge de 3C.
Ce taux de charge permet un courant de charge de $5 \times 3 = 15A$.
La capacité d'un accu étant exprimée en milli-amprère / heure, il y a un rapport direct entre le courant de charge et le temps nécessaire à cette charge.
Si on décide de charger notre LiPo à 15A (qui est la limite max), on aura donc un temps de charge de $\dfrac{5}{15} \times 60 = 20 \! minutes$
En l’absence de toute mention, on considère que tout accus accepte un taux de charge de 1C.
Vous l'aurez compris, l'idée c'est de choisir un chargeur adapté à votre batterie. Ni surdimensionné, ni sousdimensionné et qui corresponde à vos besoins en terme de rapidité de charge voire de pouvoir charger plusieurs accu en même temps.
Le chargeur doit être capable d'équilibrer les cellules de vos battreries et s'il a un mode de charge prévu pour le stockage, c'est encore mieux !
Sachez que certains chargeurs son vendu sans alimentation, c'est à dire qu'il faut prévoir une alimentation externe à venir brancher sur le chargeur. Faites-y attention avant d'acheter.
Pour le reste, ça va dépendre de votre budget 😉
6. La Power Distribution Board
C'est en quelque sorte la carte mère énergétique de votre drone. Son rôle est simplement de fournir une source d'alimentation à tous les éléments électronique de votre drone. Aussi, la plupart du temps il s'agit simplement d'un cirtcuit imprimé présentant des connecteurs sur lesquels on viendra brancher l'électronique de bord. Voici à quoi ça resemble:
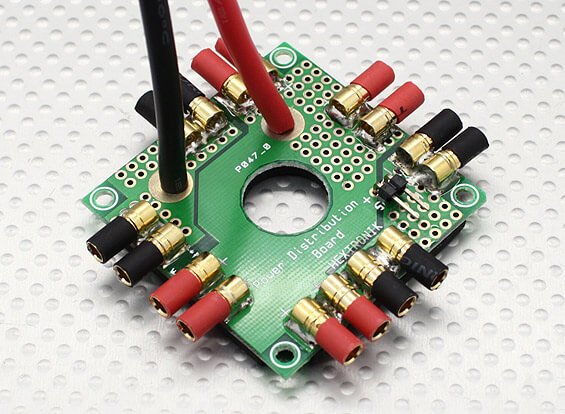
Pas de grosse contrainte concernant cet élement. Il faut simplement s'assurer que la forme de la carte est adaptée à votre drone, qu'elle fourni suffisamment de connecteurs et qu'elle est capable de supporter les appels de courrant sans cramer.
Vous pouvez en acheter des toutes faites dans le commerce ou bien la faire vous même, il ne s'agit là que d'un simple circuit imprimé avec quelques connecteurs.
Vous commencez à me connaître maintenant, vous vous doutez que je l'ai faite moi-même ! Mais ne brûlons pas les étapes, on y reviendra plus tard 😉
7. Les capteurs
Nous l'avons vu dans le premier chapitre, dans la partie concernant l'initiation à l'automatique, un drone a besoin de capteurs pour se stabiliser et se déplacer.
Concrètement, le strict minimum requis est un gyroscope 3 axes.
Heu... c'est à dire ?
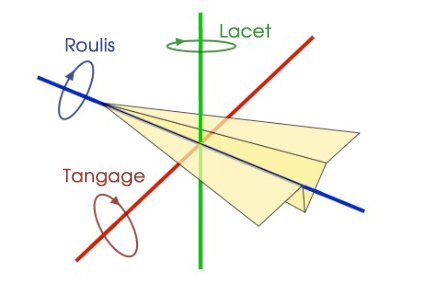
Il s'agit d'un capteur capable de mesurer l'inclinaison du drone sur les 3 axes de notre dimension à savoir, X, Y et Z.
Nous avons nommé ces trois axes dans le premier chapitre: roulis, tangage et lacet.
Pour le reste, un drone peut être équipé de:
- Un GPS, pour estimer les coordonées du drone (dans le cas d'une pilotage automatique par exemple)
- Un altimètre, pour estimer l'altitude du drone
- Un accéléromètre 3 axes, pour estimer sa vitesse de déplacement sur un axe
- ...
Cette liste est bien entendu non exhaustive, je ne cite ici que les plus évidents.
Je ne m'étends pas sur le sujet, je pense que vous aurez bien compris le rôle des capteurs. Nous aurons d'ailleurs tout le loisir de nous intéresser plus en détail sur le gyroscope dans un prochain article.
8. Le module de communication sans fil
Ce module peut être considéré comme optionnel dans le cadre d'un pilotage automatique mais dans les faits, un drone embarque toujours un système de communication sans fil.
Il va de soit ce module est "sans-fil". Personne n'a envie de se trimbaler un câble de 150m de long et de courrir derrière son drone !
Comme son nom l'indique, le but de ce module est de pouvoir communiquer avec le drone. Soit pour lui envoyer des consignes soit pour recevoir des informations, comme un flux vidéo par exemple.
Dans notre cas et pour commencer modestement, ce module aura pour unique rôle de transmettre les instructions de vols en temps réel à notre drone. Avance, recule, tourne à droite, etc...
Ce qu'il faut savoir:
Qui dit communication sans fil dit portée maximale. A vous de déterminer la portée maximale que vous souhaitez pour orienter votre choix.
Qui dit communication sans fil dit risque d'interception voir de détournement (comprenez piratage). Aussi, c'est à vous de savoir le cadre d'utilisation de votre drone et si la communication a besoin d'être sécurisée.
Selon ces choix, vous allez pouvoir vous orienter vers différents protocoles de communication sans fil: Wifi, bluetooth, protocol custom hertzien, etc...
Dans le monde du modélisme, il existe des kits de radiocommandes (émetteur) et récepteurs à tous les prix. La différence de prix est justifiée par le soin apporté à la sécurité, aux finitions, à la portée... Quoi qu'il en soit, ces kits fonctionnent de la même manière en ce qui concerne les informations transmises.
9. L'ordinateur de bord
On arrive au centre des opérations, le cervau du drone en somme. Notre drone a des capteurs, des moteurs, des variateurs, un module de communcation sans fil... il faut donc un chef d'orchestre pour centraliser toutes les informations, les traiter et finalement donner les ordres !
Son rôle est assez évident, mais on va quand-même prendre 5 minutes pour en parler.
L'ordinateur de bord va donc collecter des informations des capteurs, recevoir les consignes de vol grâce au module sans fil, effectuer de savant calculs (pas tant que ça en fait) pour déterminer la vitesse de rotation de chaque moteur et finalement envoyer les consignes à chaque ESC pour atteindre l'objectif de vol en fonction de l'état actuel du drone.
Tout ce workflow peut être représenté sous forme d'un schéma fonctionnel:
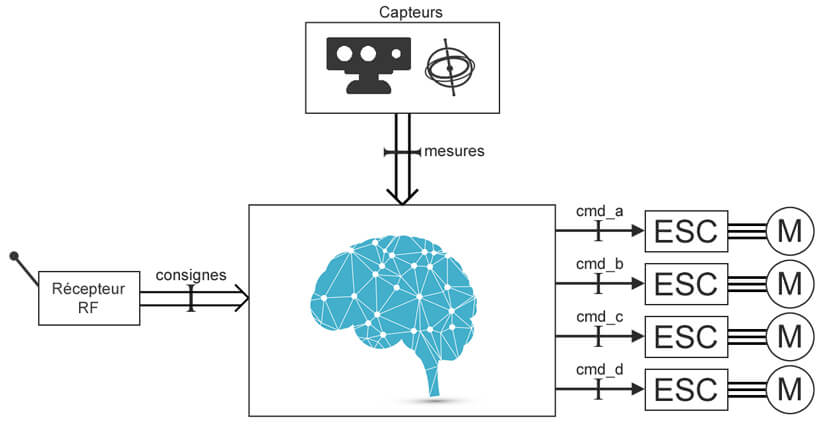
On ne représente pas l'alimentation sur un schéma fonctionnel.
Voici les significations des variables présentent sur le schéma:
- $consignes$ va contenir les valeurs de roulis, tangage, lacet & gaz à suivre.
- $mesures$ va contenir les valeurs angulaires du roulis, tangage, lacet, mesurées grâce aux capteurs.
- chaque $cmd\_x$ vaudra entre 0 et 180, valeur représentant la vitesse de rotation du moteur dédié.
J'ai laissé les moteurs sur le schéma mais ils ne sont en fait d'aucune utilité vu que l'ordinateur de bord ne communique qu'avec le ESC et qu'on en se soucie pas de l'interface ESC/Moteur.
Je les ai laissé pour que ce soit plus visuel 🙂
On l'a vu dans le premier chapitre dans la partie sur l'asservissement, le but va être ici faire conserver au drone une inclinaison donnée.
Pour vous en dire un peu plus, l'ordinateur de bord va implémenter un asservissement de type PID. Et dans notre cas, l'ordinateur de bord sera ni plus ni moins qu'un Arduino Uno, #ArduinoPOWA !
Certains diront que ce petit micro-contrôleur n'est pas taillé pour ce genre d'application, ce à quoi je leur réponds:
10. Conclusion
Vous l'aurez compris, le choix des constituants de votre drone va se faire en fonction du type de vol que vous souhaitez. À partir de là, ils seront étroitement liés.
En effet, que vous soyez intéressé par de la course ou de la balade, les composants ne seront pas les mêmes.
Le conseil que je peux vous donner est de prendre votre temps. Réfléchissez bien au type de drone que vous voulez, au budget que vous vous accordez, échangez autour de vous, renseignez-vous. Le forum est d'ailleurs là pour ça !
Ne surévaluez pas vos compétences: vous aurez l'air bien avec tout votre matos si vous êtes incapable de l'assembler.
Dans le prochain article, nous attaquerons le calibrage des ESC !
A bientôt sur Fire-DIY !
Sources : [1], [2], [3], [4], [5], [6]
Autres articles dans la catégorie Bricolage :



Vos réactions (0) :
- Sois le/la premier(e) à commenter cet article !